I ordered some electronic components from Play-Zone which made me really easy to control my unipolar stepper motor and read data from a 10k potentiometer.
Stepper motor
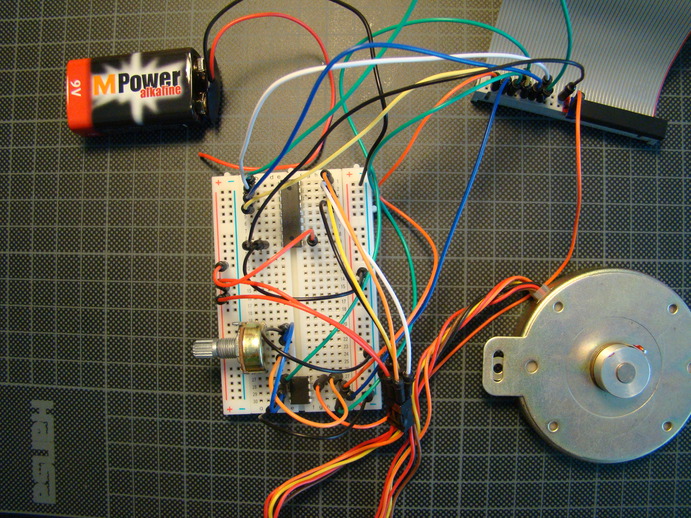
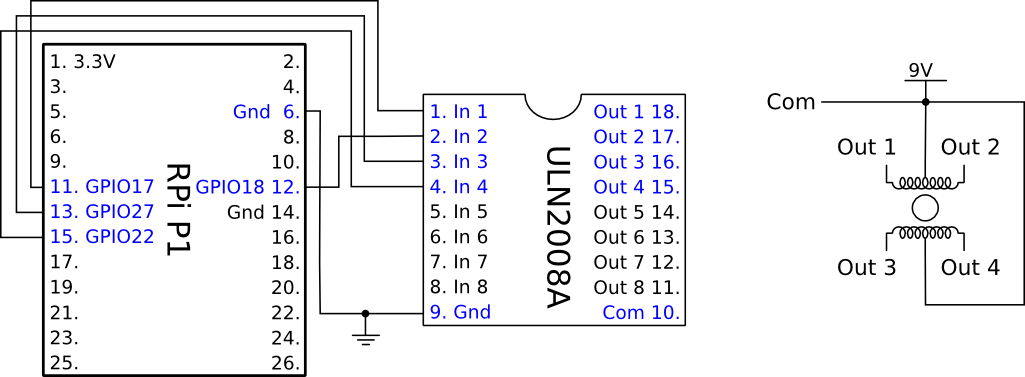
After sufficient preparation, it took me less than 15 minutes to have a nicely purring and turning stepper motor on the breadboard. The key element, a ULN2803A containing 8 Darlington Arrays, takes care of everything.
Potentiometer
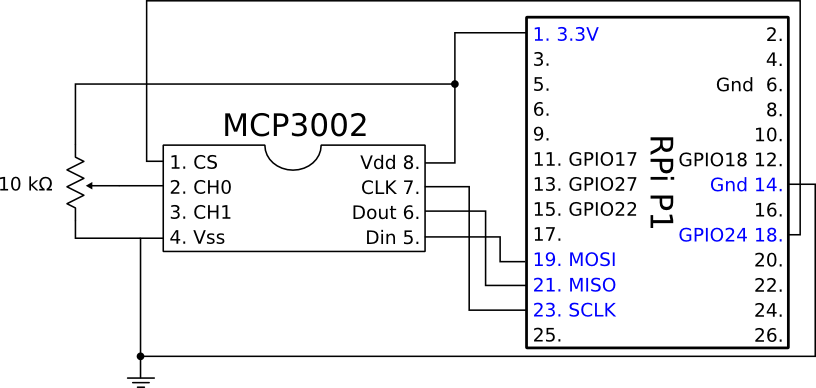
Not strictly related, but in the same go I used the newly arrived MCP3002 ADC to read the position of a 10k potentiometer. I borrowed some code from the Adafruit website with some modifications from here.
#!/usr/bin/env python
import time
import os
import RPi.GPIO as GPIO
GPIO.setmode(GPIO.BOARD)
# read SPI data from MCP3002 chip, 2 possible adc's (0 thru 1)
def readadc(adcnum, clockpin, mosipin, misopin, cspin):
if ((adcnum > 1) or (adcnum < 0)):
return -1
GPIO.output(cspin, True)
GPIO.output(clockpin, False) # start clock low
GPIO.output(cspin, False) # bring CS low
if adcnum ==0:
commandout = 0x6
else:
commandout = 0x7
commandout <<= 5 # we only need to send 3 bits here
for i in range(3):
if (commandout & 0x80):
GPIO.output(mosipin, True)
else:
GPIO.output(mosipin, False)
commandout <<= 1
GPIO.output(clockpin, True)
GPIO.output(clockpin, False)
adcout = 0
# read in one empty bit, one null bit and 10 ADC bits
for i in range(12):
GPIO.output(clockpin, True)
GPIO.output(clockpin, False)
adcout <<= 1
if (GPIO.input(misopin)):
adcout |= 0x1
GPIO.output(cspin, True)
adcout >>= 1 # first bit is 'null' so drop it
return adcout
SPICS = 18
SPIMOSI = 19
SPIMISO = 21
SPICLK = 23
# set up the SPI interface pins
GPIO.setup(SPIMOSI, GPIO.OUT)
GPIO.setup(SPIMISO, GPIO.IN)
GPIO.setup(SPICLK, GPIO.OUT)
GPIO.setup(SPICS, GPIO.OUT)
# 10k trim pot connected to adc #0
potentiometer_adc = 0;
last_read = 0 # this keeps track of the last potentiometer value
tolerance = 5 # to keep from being jittery we'll only change
# volume when the pot has moved more than 5 'counts'
while True:
# we'll assume that the pot didn't move
trim_pot_changed = False
# read the analog pin
trim_pot = readadc(potentiometer_adc, SPICLK, SPIMOSI, SPIMISO, SPICS)
# how much has it changed since the last read?
pot_adjust = abs(trim_pot - last_read)
if (pot_adjust > tolerance):
trim_pot_changed = True
if trim_pot_changed:
# convert 10bit adc0 (0-1024) trim pot read into
# 0-100 volume level
set_volume = trim_pot / 10.24
set_volume = round(set_volume) # round out decimal value
set_volume = int(set_volume) # cast volume as integer
print 'volume = {volume}%' .format(volume = set_volume)
# save the potentiometer reading for the next loop
last_read = trim_pot
# hang out and do nothing for a half second
time.sleep(0.5)
These two (independent) circuits make a big mess on the breadboard, but it was a lot of fun to wire it up. Now I can read analog as well as digital inputs from the real world with the Raspberry Pi! Yay!